













Hardware do módulo da câmera [da câmera]
February 28, 2023
1.Introduction
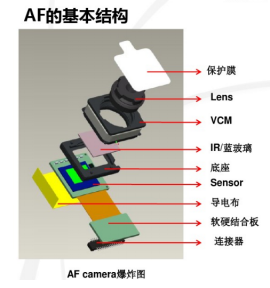
Módulo da câmera, módulo de CameraCompact do nome completo, CCM para breve. CCM consistem em quatro maiores parte: lente (lente), sensor (sensor), placa flexível (FPC), e microplaqueta do processamento de imagens (DSP). Os componentes importantes que determinam a qualidade de uma câmera são: lente (lente), microplaqueta do processamento de imagens (DSP), sensor (sensor). As tecnologias chaves de CCM incluem: tecnologia de design ótica, tecnologia de fabricação do espelho aspheric, e tecnologia de revestimento ótica.
Princípio de funcionamento: A luz recolhida pelo objeto através da lente (lente), converte o sinal ótico em um sinal elétrico através de um circuito integrado do CMOS ou do CCD, e converte-o então em um sinal da imagem digital através do processador de imagem interno (ISP) e das saídas ele aos sinais da imagem do processo e do converso do processador de sinal digital (DSP) em GRB padrão, em YUV e em outros formatos.
2. Composição do hardware
2,1 lente (lente)
A lente é um dispositivo que possa receber sinais claros e convirgir os sinais claros ao dispositivo fotossensível CMOS/CCD. A lente determina a taxa de iluminação do sensor, e seu efeito total é relativo a uma lente convexa.
Geralmente, a estrutura da lente de uma câmera é composta de diversas lentes, incluindo as lentes plásticas (PLÁSTICAS) e as lentes de vidro (VIDRO). Geralmente, as estruturas da lente usadas pela CÂMERA incluem: 1P, 2P, 1G1P, 1G3P, 2G2P, 4G, 8P, etc. Mais lentes, mais alto o custo; as lentes de vidro são mais caras do que lentes plásticas, mas o efeito da imagem latente das lentes de vidro é melhor do que aquele de lentes plásticas. Presentemente, as câmeras configuraram para telefones celulares no mercado são principalmente 1G3P (compostos de 1 lente de vidro e de 3 lentes plásticas) a fim reduzir custos.
2.1.1 indicadores principais da lente
A. Eliminação tantos como alargamentos como possível
B. claridade de imagem
C. CRA (chefe Ray Angle) deve combinar e reduzir-se proteger (cra da lente < Sensor="" CRA="">
D, a abertura tão grande como possível
E, distorção tão leve como possível, etc.
2.1.2 parâmetros principais da lente
(1) distância focal: A distância focal da lente determina o tamanho da imagem capturada, o tamanho do campo de visão, o tamanho da profundidade de campo e a perspectiva da imagem. Em linhas gerais, para uma lente da único-lente, está a uma distância do centro da lente ao ponto de foco, quando uma objetiva for composta de lentes múltiplas, que seja muito mais complicada. A distância focal aqui refere a distância do ponto central da lente à imagem clara formada no dispositivo fotossensível (CCD).
(2) campo de visão: Nós usamos frequentemente o campo de visão horizontal para refletir a escala de tiro da imagem. Maior a distância focal f, menor o ângulo de vista, e menor a escala das imagens formadas no elemento fotossensível; pelo contrário, menor a distância focal f, maior o ângulo de vista, e maior a escala das imagens formadas no elemento fotossensível.
(3) valor de F (relação de abertura): O valor de F refere o brilho da lente (isto é, a quantidade da luz transmitida pela lente). Distância focal de F=lens/diâmetro da abertura. Para o mesmo valor de F, a abertura de uma lente longa da distância focal é maior do que aquela de uma lente curto da distância focal.
abertura (de 4): A abertura é uma abertura ótico-mecânica ajustável situada dentro da lente, que pode ser usada para controlar a quantidade de luz que passa através da lente. Abertura variável (diafragma de íris). O dispositivo mecânico dentro da lente para controlar o tamanho da abertura. Ou refere o dispositivo usado para abrir ou fechar a abertura da lente para ajustar a f-parada da lente.
(5) profundidades de campo: Quando um objeto está no foco, todos os objetos dentro de uma determinada distância da frente do objeto a uma determinada distância atrás dela são equivalentes a ser claros. A distância da parte dianteira para suportar onde o foco é razoavelmente afiado é chamada profundidade de campo.
2,2 motor de bobina de voz do VCM (motor de bobina de voz)
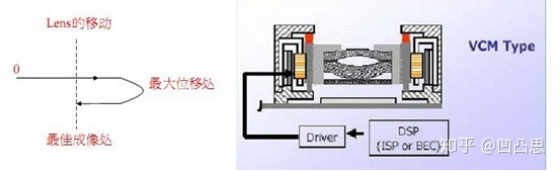
O nome completo é bobina de voz Montor, um motor de bobina de voz na eletrônica, que é um tipo do motor. Porque o princípio é similar àquele de um orador, é chamado um motor de bobina de voz, que tenha as características da resposta e da elevada precisão de alta frequência. Seu princípio principal é controlar a posição de esticão da folha da mola mudando a corrente da C.C. da bobina interna do motor em um campo magnético permanente, desse modo conduzir para cima e para baixo o movimento. As câmeras do telefone celular usam extensamente o VCM para realizar a função do auto-foco, com que a posição da lente pode ser ajustada para apresentar uma imagem clara.
2.2.1 índice do desempenho do VCM
O desempenho do VCM depende principalmente da relação da corrente à distância do curso. Partindo da corrente começando, a elevação atual deve ser proporcional à distância do curso que pode ser conduzida. Menor a corrente de aumentação exigida, mais alta a precisão. Ao mesmo tempo, igualmente depende do consumo de potência máximo, do poder máximo, e do tamanho.
2.2.2 classificação de VCMs
Da estrutura pode aproximadamente ser dividido em três categorias: (1) estrutura da metralha; (2) estrutura da bola; estrutura da fricção (de 3).
Em termos da função, pode aproximadamente ser dividido em cinco categorias: (1) motor aberto do laço aberto; (2) motor próximo do circuito fechado do laço; (3) motor meados de-montado alternativo; motor ótico da estabilização da imagem (de 4) OIS (dividido tipo no eixo do tipo, do deslocamento da tradução, de metal da memória tipo, etc.); motor da seis-linha central do laço (de 5) OIS+Close.
2.2.3 princípio de AF
Após ter entrado no modo do auto-foco, o motorista move-se de 0 para o valor máximo, de modo que a lente se mova da posição original para a posição máxima do deslocamento. Neste tempo, a superfície da imagem latente do sensor toma automaticamente imagens e salvar as no DSP. O DSP calcula cada imagem através destas imagens. O valor de MTF (função de transferência da modulação), para encontrar o valor máximo nesta curva de MTF, e com o algoritmo, para obter a correspondência atual a este ponto, e instrui mais uma vez o motorista fornecer esta corrente à bobina de voz, de modo que a lente estabilize nesta cara da imagem latente, de modo que zumbir automático seja conseguido.
2.2.4 zumbido e foco
: Realize o zumbido ótico usando o motor do zumbido (o ZUMBIDO)
Movendo a lente dentro da lente para mudar a posição do ponto de foco, o comprimento da distância focal da lente, e o tamanho do ângulo de vista da lente, para conseguir a ampliação e a redução do impacto.
B: Realize o autofocus usando o motor do foco (os AF)
Mova a posição da lente inteira (um pouco do que a lente dentro da lente) sobre uma distância pequena para controlar a distância focal da lente para conseguir imagens claras. Este método é de uso geral nos telefones celulares.
O foco ótico e o zumbido ótico são conceitos diferentes:
O zumbido ótico é mudar a posição do ponto de foco movendo a posição relativa da lente dentro da lente, para mudar o comprimento da distância focal da lente, e muda o ângulo de vista da lente, para realizar a ampliação e a redução da imagem;
A focalização ótica é realmente ajustar a posição da lente inteira (não a lente dentro da lente) para controlar a distância de imagem, para fazer a imagem a mais clara.
2,3 IR-CUT
Há uns vários comprimentos de onda da luz na natureza. A escala de comprimento de onda da luz reconhecida pelo olho humano está entre 320nm-760nm, e a luz que excede 320nm-760nm não pode ser considerada pelo olho humano; quando os componentes da imagem latente do CCD ou do CMOS da câmera puderem considerar absolutamente a maioria de comprimentos de onda da luz. Devido à participação de várias luzes, à cor restaurada pela câmera e à cor vista pelo olho nu tenha desvios na cor. Por exemplo, as plantas verdes transformam-se imagens brancas, vermelhas cinzentas transformam-se vermelho claro, preto transformam-se roxas, etc. Na noite, devido ao efeito de filtração do filtro do dobro-pico, o CCD não pode fazer o uso completo de toda a luz, e o fenômeno de nenhum ruído do floco de neve e de seu desempenho da luminosidade reduzida é insatisfatório. A fim resolver este problema, o filtro do dobro de IR-CUT é usado.
O filtro do dobro de IR-CUT refere um grupo de filtros construídos no grupo da objetiva. Quando o ponto infravermelho do sensor fora da lente detecta a mudança da intensidade de luz, o IR-CUT incorporado comuta automaticamente o filtro de acordo com o externo a intensidade da luz está comutado automaticamente em conformidade, de modo que a imagem possa conseguir o melhor efeito. Aquele é dizer, no dia ou na noite, o filtro dobro pode automaticamente comutar o filtro, assim que nenhuma matéria no dia ou na noite, o melhor efeito da imagem latente pode ser obtida.
2.3.1 composição e princípio de IR-CUT
O IR CORTOU o agulheiro dobro do filtro consiste em um filtro de passe baixo da interrupção infravermelha (um filtro infravermelho da interrupção ou de absorção), em um vidro ótico de espectro completo (um filtro espectral da completo-transmissão), em um mecanismo do poder (que possam ser eletromagnéticos, motor ou na outra fonte de energia) e o escudo, é comutado e posicionado através de um painel de controlo do circuito. Quando a luz do dia é suficiente, o painel de controlo do circuito conduz o agulheiro ao interruptor e à posição para trabalhar com o filtro infravermelho da interrupção, e o CCD ou o CMOS restauram a cor verdadeira; quando a luz visível é insuficiente na noite, o filtro infravermelho da interrupção está removido automaticamente, sistema ótico de espectro completo os começos de vidro para trabalhar. Neste tempo, pode detectar a luz infra-vermelha da lâmpada infravermelha, de modo que o CCD ou o CMOS possam fazer o uso completo de toda a luz, melhorando desse modo extremamente o desempenho da visão noturna da câmera infravermelha, e a imagem inteira seja clara e natural.
2.3.2 índice de IR-CUT
A. O grau infravermelho da interrupção, o transmitância claro, e a luz que dá forma ao efeito do filtro.
b. Peça da movimentação de poder
c. Circuito de controle
4. Filtro ótico: O revestimento do IR ou o vidro azul são usados geralmente para filtrar para fora a luz infra-vermelha.
2,4 sensores
O sensor da imagem (sensor da imagem) é uma microplaqueta do semicondutor com milhões aos dez de milhões de fotodiodos em sua superfície. Quando os fotodiodos são iluminados, gerarão cargas e converterão a luz em sinais elétricos. Sua função é similar aos olhos humanos, assim que o desempenho do sensor afetará diretamente o desempenho da câmera.
2.4.1 estrutura do sensor
2.4.2 classificação
Elemento fotossensível: CCD, CMOS (PPS e APS)
Processos diferentes: FSI dianteiro-iluminado, para trás-iluminou o BSI, empilhado
2.4.3 indicadores
1. pixéis
O sensor tem muitas pilhas sensíveis à luz que convertem a luz nas cargas elétricas, que formam uma imagem eletrônica que corresponde à cena. No sensor, cada unidade fotossensível corresponde a um pixel (pixéis). Mais pixéis, significa que pode detectar mais detalhes do objeto, assim que a imagem é mais clara. Mais alto o pixel, mais claro o efeito da imagem latente. O produto da definição da câmera é o valor do pixel, por exemplo: 1280×960=1228800
2. Tamanho do alvo
O tamanho da peça fotossensível do sensor da imagem, expressada geralmente nas polegadas. Como uma tevê, estes dados referem geralmente o comprimento diagonal do sensor da imagem, tal como 1/3 de polegada, maior a superfície do alvo, melhor a transmissão clara, e menor a superfície do alvo, mais fácil é obter a maior profundidade de campo.
3. Sensibilidade
É detectar a intensidade da luz de incidente através do CCD ou o CMOS e circuitos eletrônicos relativos. Mais alta a sensibilidade, mais forte a sensibilidade da superfície fotossensível a se iluminar, e mais alta a velocidade do obturador, que é especialmente importante ao disparar em veículos dos esportes e em fiscalização da noite.
4. Obturador eletrônico
é um termo inventado na referência à função mecânica do obturador de uma câmera. Controla a época dedetecção do sensor da imagem. Desde que o valor dedetecção do sensor da imagem é a acumulação de cargas do sinal, mais longo o tempo dedetecção, mais longo o tempo da acumulação da carga do sinal, e maior a amplitude da corrente do sinal de saída. Mais rápido o obturador eletrônico, mais baixa a sensibilidade, que é apropriada para disparar sob a luz forte.
5. Taxa de quadros
Refere o número de imagens gravadas ou jogadas pelo tempo de unidade. Continuamente jogar uma série de imagens produzirá um efeito de animação. De acordo com o sistema visual humano, quando a velocidade do playback da imagem é maior de 15 frames por segundo (isto é, 15 quadros), o olho humano pode mal ver o salto da imagem; quando alcançar 24 quadros /s — — quando 30 frames/s (isto é, entre 24 quadros e 30 quadros), o fenômeno da cintilação não forem basicamente visíveis.
Os frames por segundo (fps) ou a taxa de quadros indicam quanto por segundo das épocas o sensor dos gráficos pode atualizar ao processar o campo. Resultados altos de uma taxa de quadros em uma experiência visual mais lisa, mais realística.
6. Relação de relação sinal-ruído
é a relação da tensão do sinal à tensão do ruído, e a unidade da relação de relação sinal-ruído é expressada no DB. Geralmente, o valor da relação de relação sinal-ruído dado pela câmera é o valor quando o AGC (controle automático de ganho) é desligado, porque quando o AGC é girado sobre, o sinal pequeno estará impulsionado, de modo que o nível de ruído igualmente aumente em conformidade.
O valor típico da relação de relação sinal-ruído é 45-55dB. Se é 50dB, a imagem tem uma pequena quantidade de ruído, mas a qualidade da imagem é boa; se é 60dB, a qualidade da imagem é excelente e não há nenhum ruído. Melhor o controle. O número de pontos do ruído na imagem relativa a este parâmetro, mais alta a relação de relação sinal-ruído, o líquido de limpeza a imagem é, e menos ponto-como o ruído na imagem da visão noturna.
2,5 DSPs
Função do processador de sinal DSP de Digitas (TRATAMENTO DOS SINAIS de DIGITAL): principalmente com uma série de operações matemáticas complexas do algoritmo para aperfeiçoar os parâmetros de sinal da imagem digital, e para transmitir o sinal processado ao PC e o outro equipamento com USB e as outras relações
2.5.1 diferença entre DSP e ISP
Glossário:
O ISP é a abreviatura do processador de sinal da imagem, que é o processador de sinal da imagem.
DSP é a abreviatura do processador de sinal de Digitas, isto é, processador de sinal digital.
Explicação da função:
O ISP é usado geralmente para processar os dados de saída do sensor da imagem (sensor da imagem), como CEA (controle da exposição automática), AGC (controle automático de ganho), AWB (equilíbrio branco automático), correção da cor, proteção da lente, correção da gama, e elimina pixéis inoperantes, o auto nível preto, o auto nível branco e as outras funções.
DSP tem mais funções, ele pode fazer alguns fotos e eco (codec do JPEG), vídeo e playback (codec video), codec H.264, e muito o outro processamento, em curto, processando o sinal digital.